Hypothesis:
If there are windows near by, then there will be more light on that side of the room than where there are without windows, so in our robotics room more light would be on the left side of the room than the right side.
Our Robot

This is the design we used for this design challenge. All we needed was the NXT programmer in order to know what to do, as well as a light sensor to collect the data of the light as we tested different areas in the room. Our light sensor was connected to port 1 on our NXT programmer.
Program
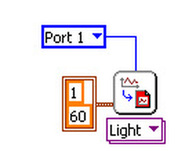
This program tells our robot to collect data using the light sensor connected every 1 second for 60 seconds. The light sensor is also shown to be connected to port 1 on our NXT programmer.
Data
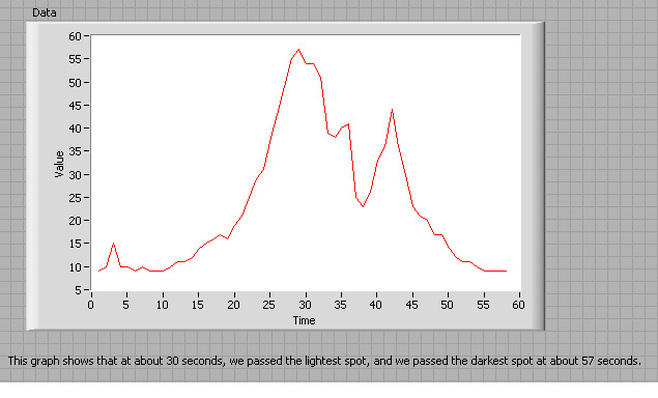
This is the data that we collected by walking around the room with our NXT programmer and light sensor. The lightest spot is shown to be where we were standing at about 30 seconds, which was when we were closest to the windows. On the other hand, the darkest spot was at about 57 seconds, which is when we were in the other corner of the room near the teacher's desk. This area of the room does not have any windows nearby.

These are pictures of the lightest and darkest areas of the room. The picture on the left shows the lightest area with the windows, while the picture on the right shows the darkest area without any windows. The results were more accurate than these pictures shown because we collected our data with the lights off.
