Scrapped Design Challenge
This design challenge was not successfully finished. It was decided by our teacher to come to a stop after several technical difficulties. These included such things as burned out motors, and motor controllers. This also went along with many programming and design problems. This was a very difficult challenge, that with altercations put into place next year will come out with a much better product.
Prototype 1

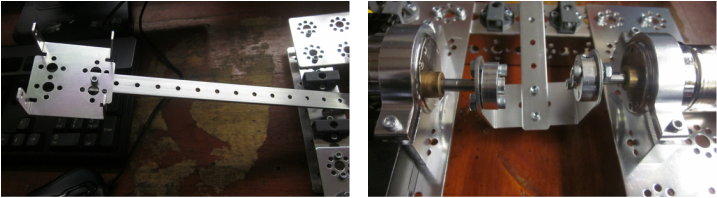
Our first prototype was unsuccessful, although we did not get this design on camera. We used two full rods (shown in the picture to the left), which were too heavy for the motors to move with ease. At first, we thought this was a programming problem, until we tryed all different variations of the motor directions and speeds. With this, we concluded that it was something else that was the problem. We decided on the weight, since looking around, other teams were being successful by using much less than two bulky rods.
Prototype 2
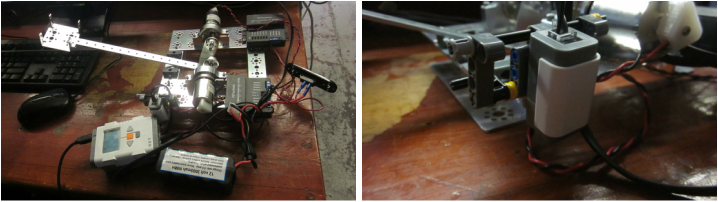
This was our successful robot. It contains of two motors, a sturdy base, a battery, an on and off switch, two motor controllers, an NXT programmer, and a much more lighter weight arm. After having problems with our first design, we concluded that it was the weight of the arm. By using only one, skinny arm, our motors were able to swing it up and over. This allows the ball to gain momentum then leave the holder that it sits in to begin.
Our Program
True
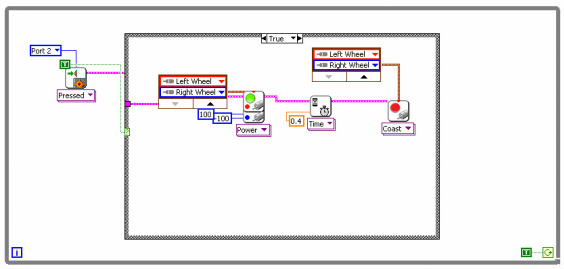
This is our program. We only went through one program during our project, because it was the robot design that we were having the issues with. The true portion of our program shows that when the touch sensor is pressed, the right and left motors will move in a direction at 100 power level for a certain time of .4 seconds. After this time frame, both motors will coast to a stop.
False
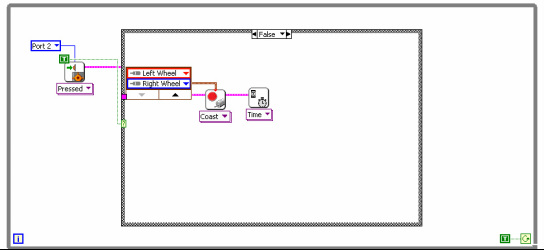
The false portion of our robot shows that if the touch sensor is not pressed, the motors will not move for any certain amount of time. This will make our robot stay still and do nothing.
