Info
In this design challenge we have to create a robot that can navigate through a series of obstacles using an ultrasonic sensor. This ultrasonic sensor will help by telling our robot where an object is and when to turn. The ultrasonic sensor is one of the two sensors that helps the robot be able to see and therefore be able to see and detect objects. This makes it so the robot can avoid obstacles, sense and measure distance, and sense movement. It can be measured in both inches and centimeters. Just like an echo, the distance is measured by calculating the time it takes for a sound wave to hit an object and return. The sensor is also affected by the object it is sensing. Larger objects with a harder surface gives a much better reading compared to a smaller, soft fabric, or if the object is curved.
Another major aspect to this challenge is our program. Our final working program is going to have to be successful navigating, back and forth, by 5 obstacles. My thoughts on making this work, is first off using the ultrasonic sensor icon in the program. We will have to make sure this is at a high enough level to be able to sense our objects. Second, the wheels need to start off synchronized or it will mess up the entire route. Then, when approaching the obstacles we will need to find a way to make the robot come to a stop, turn 1/4 of the way around, go straight for a certain amount of time, then turn again and continue forward to the next obstacle. This will be the hardest challenge, most likely having many trials and errors during the process. Then once we get a working program to do this once, we most likely will be extremely close to completing the design challenge. I believe after that the last thing we will need to do is make another strip of the exact same program, only causing the robot to turn in the opposite direction, and after this we would be able to link these together and make the program jump back to the start and continue this program over and over again.
Another major aspect to this challenge is our program. Our final working program is going to have to be successful navigating, back and forth, by 5 obstacles. My thoughts on making this work, is first off using the ultrasonic sensor icon in the program. We will have to make sure this is at a high enough level to be able to sense our objects. Second, the wheels need to start off synchronized or it will mess up the entire route. Then, when approaching the obstacles we will need to find a way to make the robot come to a stop, turn 1/4 of the way around, go straight for a certain amount of time, then turn again and continue forward to the next obstacle. This will be the hardest challenge, most likely having many trials and errors during the process. Then once we get a working program to do this once, we most likely will be extremely close to completing the design challenge. I believe after that the last thing we will need to do is make another strip of the exact same program, only causing the robot to turn in the opposite direction, and after this we would be able to link these together and make the program jump back to the start and continue this program over and over again.
Definitions
Ultrasonic (adj): Of or relating to frequencies above the range audible to the human
ear, or above approximately 20,000 hertz.
ear, or above approximately 20,000 hertz.
Prototype 1
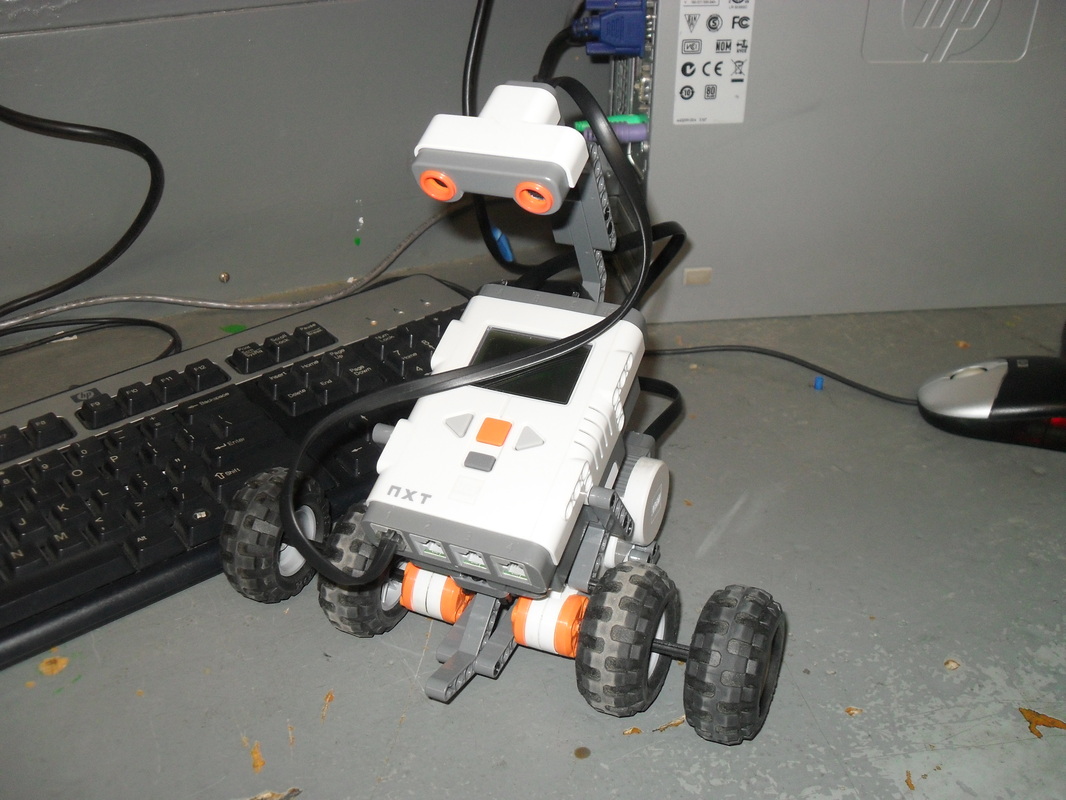
Our first prototype did work for the fact that it successfully moved and censored objects. It was a sturdy robot with two wheels on each side to help with its turns. Then we connected the ultrasonic sensor to the top. The only problem with this was that when we would turn the robot on, it would sense our hand in the way and go through the program too soon.
Prototype 2

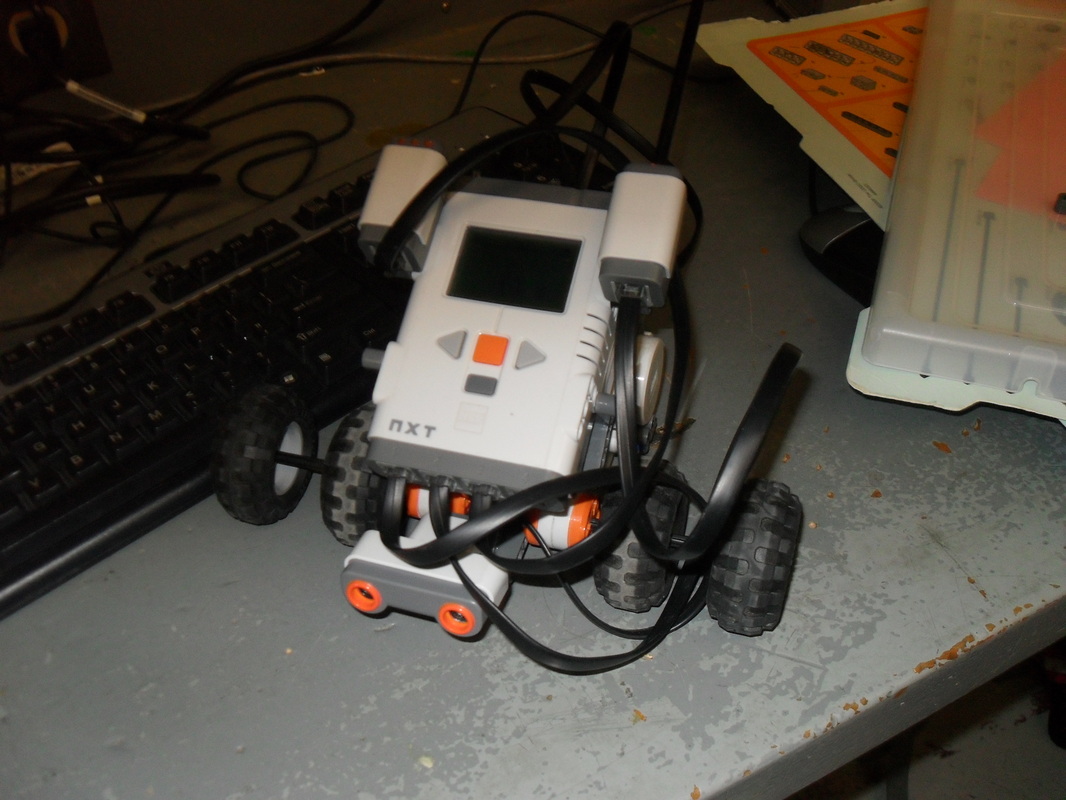
To fix our prior problem of sensing our hand when turning on the robot, we added the touch sensor in the back of everything. This sensor made it so when we push on the long rod the program will start, and the robot will begin to move without seeing anything in its way. Then we noticed if we played too much with the robot the ultrasonic sensor would move and we thought it was sensing the ground at times, making it turn at the wrong time.
Prototype 3
We thought of moving the ultrasonic sensor eyes to the bottom front of our robot, looking straight out. This was to fix the problem of unnecessary tilting caused by our unsteady way of connecting it to the back of our robot. In this prototype we also added a sound sensor to clap when we want our robot to turn. This is because our robot was having difficulty in knowing when and how far to go before making its turn.
Success
| movie_sonar.wmv |
