Engineering Design Process
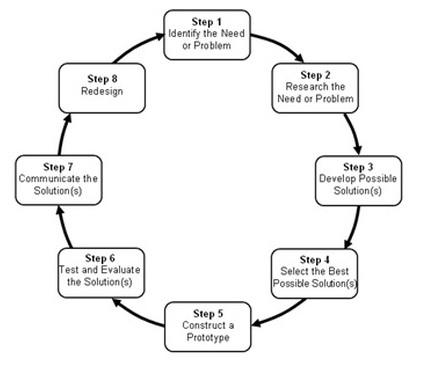
Step 1 - Identify the Project
Today in class, February 4th, we discussed what we wanted to do for our project. We looked up ideas online and weighed our best options. My suggestion was to design, build and program a robot using tetrix that resembled a scooter, as well as could function as one with humans. My partner Alyssa felt we should not put this much weight on our robot and suggested that we make a bowling bot. After running this by our teacher, we decided that this was deffinitely what we were going to execute as our project. Over these next weeks, we will be working on creating a robot that can hold a ball, then throw it when told in a straight line to get a strike. We will also have to make a bowling alley and find something to use as pins, which could possibly be ten empty water bottles. Another issue we will have to look into would be what size ball we want to use to see what our options are considering size and weight before designing our robot.
Step 2 - Research
During the research process, we looked on youtube to find videos that showed a similiar project to what we are going to do. This way we would get helpful information and ideas going into designing our robot. Here are some of the links we watched:
http://www.youtube.com/watch?v=vdc_qhwr4sY
http://www.youtube.com/watch?v=KvK8dO6lBeE
We also looked at a link specifically made about tetrix robots:
http://www.tetrixrobotics.com/Building_System/Projects/default.aspx?pID=2
Here we found a diagram that could become helpful as we move ahead in our design challenge:
http://www.youtube.com/watch?v=vdc_qhwr4sY
http://www.youtube.com/watch?v=KvK8dO6lBeE
We also looked at a link specifically made about tetrix robots:
http://www.tetrixrobotics.com/Building_System/Projects/default.aspx?pID=2
Here we found a diagram that could become helpful as we move ahead in our design challenge:

After looking at all of our options, we concluded that a light sensor could be very helpful to our design, as well as using empty water bottles and a tennis ball for our props.
Step 3 - Develop a Possible Solution
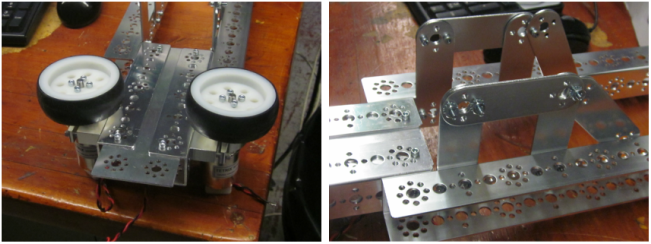
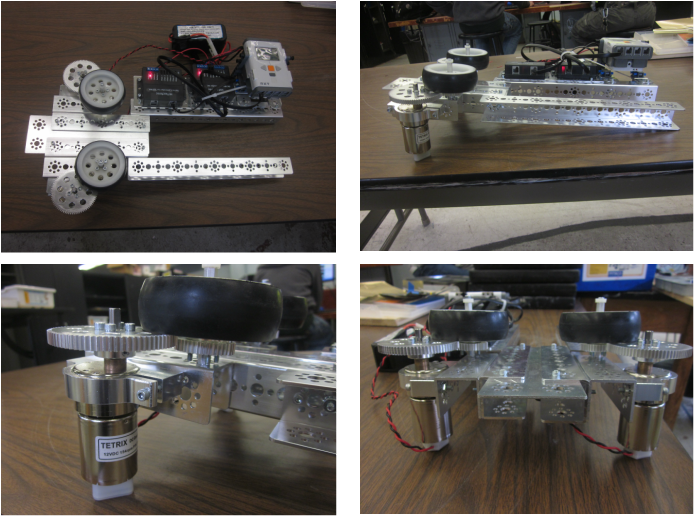
To begin our robot design, we decided to use the two tetrix wheels in a way that would give the tennis ball enough pressure to go through and leave the other end on its own. The second picture shows our design after the ball leaves the tetrix wheels. We added side rails so that the ball will continue on its path inbetween them, in order to proceed in a straight line towards the bowling pins. We also thought of using a light sensor that might indicate where the bowling pins are and help aim straight.
Step 4 - Select the Best Possible Solution(s)

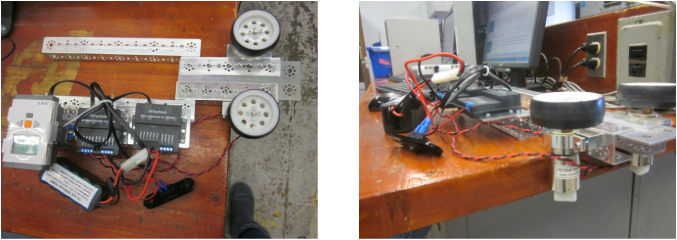
We have not tested our robot yet to see if it is successful. As we go forward with this project we will add or take away pieces as needed. We needed to find a place to rest our DC motor controllers, battery and NXT programmer. We decided to add on to our design (shown in the picture to the left) to stabalize these items.
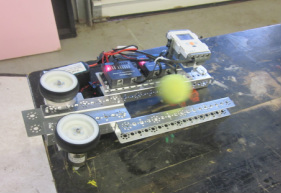
Step 5 - Construct a Prototype
After simple testing, we found that the guards were getting in the way at times. We decided to take these off and see if this would allow for the ball to go faster coming out of the machine, which would allow it to knock over more bowling pins.
Step 6 - Test & Evaluate the Solutions
After testing our new design, taking the guards off did help the ball go faster. It would not ge caught up in the guards that were only meant to keep the ball moving in a straight line. We noticed that the ball still wasn't coming out at great speed and probably wouldn't knock over many bowling pins. We are realizing that we might need to use gears in our design.
Step 7 - Communicate the Solution(s)

After watching our robot design in action, we concluded that it still does not have enough power and speed to knock over multiple water bottles. We feel that this could be fixed by adding gears to the motors in a ratio that will help with its speed to be faster and more powerful. This would be by attaching a big gear to a little gear in our design.
Step 8 - Redesign
After noticing our wheels were not turning fast enough to knock down any waterbottles, we decided top figure out a way to add gears to increase the speed and strength. The gear ratio we used was big gear to small gear. This was a big process for us to figure out a way that would connect the gears and wheel, at an appropriate spot that will still allow the tennis ball to go through at its maximum speed. After two trials on gear placement, we found this placement was successful. At the end of this redesign step, our robot was able to successfully shoot out the tennis ball at a fast enough pace to knock down six empty water bottles.
Program
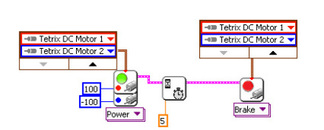
This is the program that we used for our bowling bot. It shows that we used two motors, at 100% speed/power, for five seconds, then both motors stopped. Our program was successful.
Reflection
1.Did I do more or less than Mr. Croke expected?
I believe I did what Mr. Croke expected. I believe if given more time, we could have been able to make our robot design even better. We could have added a light sensor so where the ball is shot out of could line up with the bowling pins by itself.
2.What are my strongest points?
I believe my strongest points are the building portion of the design process. I enjoy to build the robot and feel that I am able to understand how the parts can go together successfully that allows our robot to work in any design challenge that is given.
3.What are my weakest points?
I believe that my weakest point is the programming of the robot. Throughtout this year I have not yet had an experience where I really had to make a complex program. Although I do understand small programs, such as this one.
4.What should our team do to improve our work?
To improve our work, we could have added gears sooner. We already knew from others who had tryed a similiar design that it was not very powerful. If we had listened to this from the beginning, we could have saved time during the process and possibly make an even more advanced design or challenge.
Write about what you have learned and how it leads to meeting the: state goals, science technology standards, Somerset Berkley High School district standards, Mr. Croke’s standards
During this process, I have learned how to successfully incorporate gears into our designs. We followed the engineering design process which directed us towards finding that our first design was not powerful enough. If we had not used this process, we probably would not have redesigned because although it was not strong, the design to work. This would not have met the standards of the school or Mr. Croke, but by using this method, we were able to reach these standards.
Describe the social impacts and tradeoffs of the solution.
The social impacts that could occur if fixing some minor problems that came from our design, is the possible creation of weapons used by robots. By this design, if we were or someone else is able to figure this out in the future, this could be possible. By finding a way to (in our case) aim the place where the ball is shot out, to be very accurate and create strikes every tmie it is tested, the same could go for weapons such as bombs or guns. This could become very dangerous depending on how quickly this advancement could possibly be made.
I believe I did what Mr. Croke expected. I believe if given more time, we could have been able to make our robot design even better. We could have added a light sensor so where the ball is shot out of could line up with the bowling pins by itself.
2.What are my strongest points?
I believe my strongest points are the building portion of the design process. I enjoy to build the robot and feel that I am able to understand how the parts can go together successfully that allows our robot to work in any design challenge that is given.
3.What are my weakest points?
I believe that my weakest point is the programming of the robot. Throughtout this year I have not yet had an experience where I really had to make a complex program. Although I do understand small programs, such as this one.
4.What should our team do to improve our work?
To improve our work, we could have added gears sooner. We already knew from others who had tryed a similiar design that it was not very powerful. If we had listened to this from the beginning, we could have saved time during the process and possibly make an even more advanced design or challenge.
Write about what you have learned and how it leads to meeting the: state goals, science technology standards, Somerset Berkley High School district standards, Mr. Croke’s standards
During this process, I have learned how to successfully incorporate gears into our designs. We followed the engineering design process which directed us towards finding that our first design was not powerful enough. If we had not used this process, we probably would not have redesigned because although it was not strong, the design to work. This would not have met the standards of the school or Mr. Croke, but by using this method, we were able to reach these standards.
Describe the social impacts and tradeoffs of the solution.
The social impacts that could occur if fixing some minor problems that came from our design, is the possible creation of weapons used by robots. By this design, if we were or someone else is able to figure this out in the future, this could be possible. By finding a way to (in our case) aim the place where the ball is shot out, to be very accurate and create strikes every tmie it is tested, the same could go for weapons such as bombs or guns. This could become very dangerous depending on how quickly this advancement could possibly be made.
