Objectives
To collect data to solve a particular problem.
To use data to make predictions then test them.
To interpolate from a line graph plotting time vs. distance.
To use data to make predictions then test them.
To interpolate from a line graph plotting time vs. distance.
Portfolio Guide Reflection
1. State the assignment (problem/project) in your own words.
For this project we are suspected to build, design, and program a robot that is able to travel various distances along an 8 foot span. We are also expected to create a graph that compares our robots data regarding time vs distance. For this project we have a time constraint. We are given 4 classes to build, program, and collect the data for our robot. On the 5th day we are to be assigned a "parking space" in which case we have to program our robot to park entirely within this space.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
Before beginning this project we needed to know/figure out what type of structure we should use for this assignment. Since we knew we needed it to fit into some size of a space, we thought a smaller structure than our previous design would be best. Also, we needed to research if we would need any sensors to make this happen, or if we could complete all of this by labview itself.
http://www.youtube.com/watch?v=IdqZhIH9DHg
http://www.youtube.com/watch?v=5VmM4wgDCHQ
http://www.youtube.com/watch?v=vPDFZm7QwRU
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
To complete this project on time, we had to manage our time well. We started by building our robot. Regarding this we already had a good idea of what we wanted it to look like (being a small design), so we didn't have many problem solving issues in this area. After building, we worked on the wiring. Once this was done we solved the problems we were given to give us better understand for our next step. This next step was to complete a time vs. distance graph with the data we find. Prior to this we needed to create a simple program to complete this. We completed all of our data just on time during the last day, so on the final day for our final step, we were given a parking space that we had to program our robot to move up to and stop in.
4. Describe the final output / product in detail: (what are we looking at?)
Our final product was a working robot design with a correct program, making us successful in the end. This means our robot was able to go a certain amount of distance and stop at the correct spot by only using a program. We were able to figure this out by the data we collected prior to having to park our robot. This challenge taught us how to program a robot and be able to tell exactly where it will end up.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We recieved feedback and ideas from both our instructor and peers. Our instructor helped us program our robot, since this was out first time doing this, as well as explain to us how to get the measurements to complete our chart because we were confused on how to go about this. Our peers gave us help in the area of wiring, since again we didn't know much about this. A very helpful suggestion was to not connect the battery to the fuse before completing the entire wiring job. It's nice to know our classmates don't want us to get electrocuted.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
During this assignment, I learned a lot. It was the my first experience putting together the robot. I accidently messed up the direction of the stable beams which made it more difficult and lengthy in making the rest of the robot, although it could still be done by add ons. For my next design, I will know to start the beams in the direction that will make it easiest for the rest of the design. I also learned how to wire our robot. It was difficult at first but once I started to understand the picture and concept it became really easy and fun.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
If I were able to do this project again, I would manage our time better. Having to learn most of the process during this we were slower and were rushing at the end to complete taking our data. If we went at a faster pace from the beginning this would have been more relaxing. Also, I would do something more complex with the programming relating to the same kind of challenge. This is because I find that my weak spot is in the programming and would like a chance to be able to play around with this.
For this project we are suspected to build, design, and program a robot that is able to travel various distances along an 8 foot span. We are also expected to create a graph that compares our robots data regarding time vs distance. For this project we have a time constraint. We are given 4 classes to build, program, and collect the data for our robot. On the 5th day we are to be assigned a "parking space" in which case we have to program our robot to park entirely within this space.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
Before beginning this project we needed to know/figure out what type of structure we should use for this assignment. Since we knew we needed it to fit into some size of a space, we thought a smaller structure than our previous design would be best. Also, we needed to research if we would need any sensors to make this happen, or if we could complete all of this by labview itself.
http://www.youtube.com/watch?v=IdqZhIH9DHg
http://www.youtube.com/watch?v=5VmM4wgDCHQ
http://www.youtube.com/watch?v=vPDFZm7QwRU
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
To complete this project on time, we had to manage our time well. We started by building our robot. Regarding this we already had a good idea of what we wanted it to look like (being a small design), so we didn't have many problem solving issues in this area. After building, we worked on the wiring. Once this was done we solved the problems we were given to give us better understand for our next step. This next step was to complete a time vs. distance graph with the data we find. Prior to this we needed to create a simple program to complete this. We completed all of our data just on time during the last day, so on the final day for our final step, we were given a parking space that we had to program our robot to move up to and stop in.
4. Describe the final output / product in detail: (what are we looking at?)
Our final product was a working robot design with a correct program, making us successful in the end. This means our robot was able to go a certain amount of distance and stop at the correct spot by only using a program. We were able to figure this out by the data we collected prior to having to park our robot. This challenge taught us how to program a robot and be able to tell exactly where it will end up.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
We recieved feedback and ideas from both our instructor and peers. Our instructor helped us program our robot, since this was out first time doing this, as well as explain to us how to get the measurements to complete our chart because we were confused on how to go about this. Our peers gave us help in the area of wiring, since again we didn't know much about this. A very helpful suggestion was to not connect the battery to the fuse before completing the entire wiring job. It's nice to know our classmates don't want us to get electrocuted.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
During this assignment, I learned a lot. It was the my first experience putting together the robot. I accidently messed up the direction of the stable beams which made it more difficult and lengthy in making the rest of the robot, although it could still be done by add ons. For my next design, I will know to start the beams in the direction that will make it easiest for the rest of the design. I also learned how to wire our robot. It was difficult at first but once I started to understand the picture and concept it became really easy and fun.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
If I were able to do this project again, I would manage our time better. Having to learn most of the process during this we were slower and were rushing at the end to complete taking our data. If we went at a faster pace from the beginning this would have been more relaxing. Also, I would do something more complex with the programming relating to the same kind of challenge. This is because I find that my weak spot is in the programming and would like a chance to be able to play around with this.
Our Robot(:

This is a front and side view of our robot that we used desighned, built, and programmed during this design challenge. It contains two motors and a battery. The major difference from our prior design is the size. When we heard of this design challenge our first thought was to make a smaller design resembling our first robot. This is because we don't know the exact size of the parking space that we will be given and want out robot to be able to fit into the designated space. I also believe our robot design came out looking like a dog. This was not planned, but was just an added bonus!(:
Program
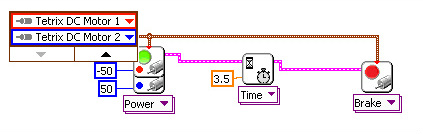
Our program tells our robot to move forward for a certain amount of time then stops. Our time value is able to change. This allows us to change how long the robot will move in order to stop at the right parking spot, depending what we were given. The parking spot we were given was at 165 cm along the table. The time we needed for this was 5.02218 which would replace the time of 3.5 in the above program.
Time vs. Distance Graph
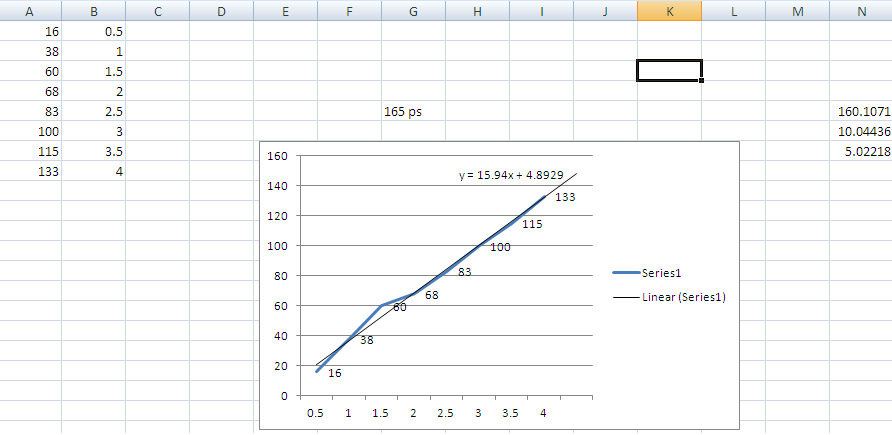
Using the data we collected we were able to create a graph. From this graph we were able to plug in any amount of distance and find the time value needed to stop right on this spot. We were given a parking space at 165 cm. Useing the slope intercept formula we plugged this in as the y value and found the x value (time value). This process is shown on the right hand side. We then plugged in this time value into our program, which did successfully stop our robot at the correct spot.
Useful Equations
Pi = approx . 3.14
Circumference = Dia. * Pi
Diameter = Radius *2
1 rotation = 360 degrees
Circumference = Dia. * Pi
Diameter = Radius *2
1 rotation = 360 degrees
Problem
Ralph measures the wheels on his robot. He finds the diameter is 2.3 cm. His program is shown in the picture below.

How far should his robot go? His robot should go 5200 cm.
What is the diameter of your wheel? The diameter is 7 cm.
What distance does your robot travel in one rotation? One rotation would be 22 cm.
What is the diameter of your wheel? The diameter is 7 cm.
What distance does your robot travel in one rotation? One rotation would be 22 cm.
