Engineering Process
Step 1: Design, build, and program a robot that can stay on a table using any sensor.
Step 2: NXT Robot that does not fall off a table
http://www.youtube.com/watch?v=honTxqmZgMs
nxt table trailer
http://www.youtube.com/watch?v=24sX9MtqQNA
Table Bot
http://www.youtube.com/watch?v=KHWOcABSf6Y
Step 3: Our ideas were creating a stable structure, so all we had to deal with was the
touch sensor, using two motors, connecting the touch sensor in front pointing
straight down, using power level 3, having a swivel wheel in the back, and
using either a wheel coming off of the touch or light sensor or any other
rounded piece that would allow the robot to back up onto the table.
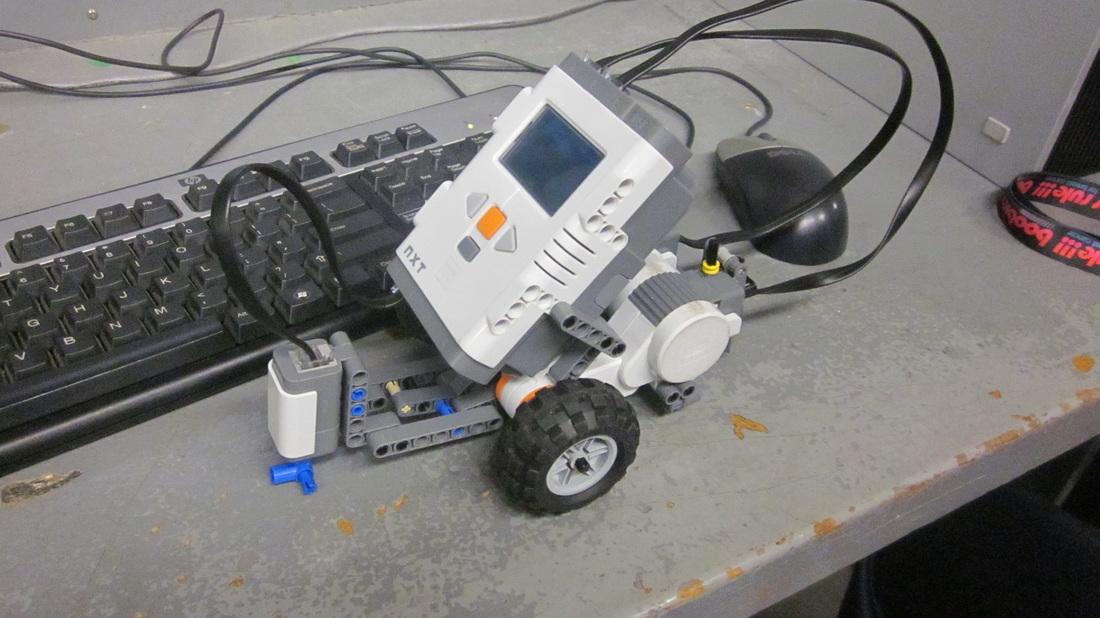
Step 4: We decided to use a stable, known structure that uses two motors and a swivel
wheel, as well as a touch sensor pointed straight down with a rounded piece on
the edge.
Step 2: NXT Robot that does not fall off a table
http://www.youtube.com/watch?v=honTxqmZgMs
nxt table trailer
http://www.youtube.com/watch?v=24sX9MtqQNA
Table Bot
http://www.youtube.com/watch?v=KHWOcABSf6Y
Step 3: Our ideas were creating a stable structure, so all we had to deal with was the
touch sensor, using two motors, connecting the touch sensor in front pointing
straight down, using power level 3, having a swivel wheel in the back, and
using either a wheel coming off of the touch or light sensor or any other
rounded piece that would allow the robot to back up onto the table.
Step 4: We decided to use a stable, known structure that uses two motors and a swivel
wheel, as well as a touch sensor pointed straight down with a rounded piece on
the edge.
Prototype 1

For our first prototype, we tryed using the touch sensor with a rounded piece at the end, so it could easily back up onto the table again. Even though this was successful, we felt like we could make the design even better. The design wasn't as consistant as we would have liked it, meaning the rounded piece wouldn't always push back into the touch sensor enough to register in the program.
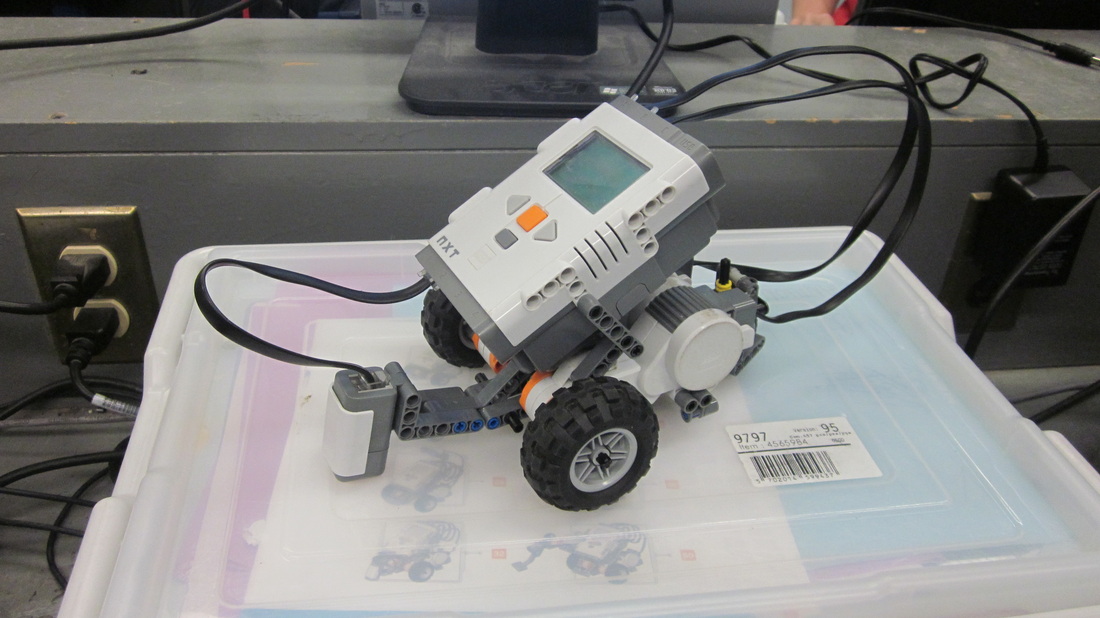
Prototype 2

In our second design, we chose to try using the light sensor, and kept everything else the same (the structure of our robot). We felt that the light sensor worked better than the touch sensor because it was able to sense when the robot was going off and back onto the table each time.
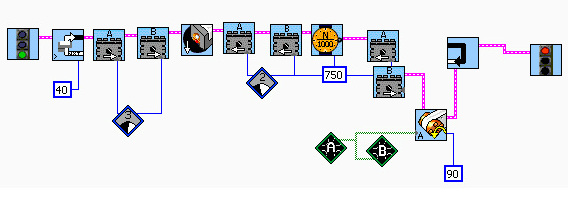
Program Behaviors
Our program was the biggest issue. In our first program, the robot would start turning continuously without any reason. We fixed this adding the rotateing wheel by 90 degrees. Our final working program was: both motors move forward at power level three, then when the light sensor senses change (off the table) it would back up at power level two for a certain amount of them, then turn 90 degrees. This program was looped.
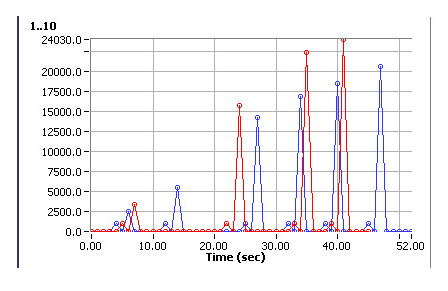
This is a graph of the light sensors readings. It shows similar data after two trials, showing consistency in our design. Our interpretation is that higher points of the line represents when the robot was on the table, because it was reflecting more light. The other part of the lines (when they are straight and at zero) is when the robot was sensing being off the table.
What We Learned
During this design challenge, we learned that we don't always have to design strictly within the regulations of the general challenge. By this I am referring to how when the design challenge of Table Bot is first introduced, it is said to be a "touch sensor challenge". This is why we first tryed to use the touch sensor in our design, but thought we could do even better than that. That is why we changed to using the light sensor, and became the first design team to successfully use the light sensor in the Table Bot challenge.
What We Would Do Differently
I think if we could do something differently in this challenge, we would add something to make the challenge more complicated. In general, this challenge was one of the easier ones that we have done, and also compared to the others we had to go through much less prototypes and trial and error to be successful. So because of this, I might add something such as an obstacle on the table for the robot to manuever around. This would make the program more complicated to try and figure out.
