Engineering Design Process:
1. identify the need/problem: At this stage we are supposed to choose a problem that we feel could be changed for the better.
2. Research the need/problem: Here we research good and useful ideas that would help when we get to the designing process.
3. Develop Possible Solution(s): At that stage we brainstorm all the ideas that we think might be useful for our robot and the challenge it has to be successful in.
4. Select the best possible solution(s): Here we narrow down our brainstorm list to the ones we feel are the best.
5. Construct a prototype: Here we use the ideas we decided from our brainstorm list to construct our first prototype.
6. Test and Evaluate the solutions: At this stage we use a program to test our robot and see how successful we were.
7. Communicate the solutions: During this stage, we conclue what the issues of our first robot were and make a plan for the next one which would hopefully make it more successful.
8. Redesign: Lastly, at this stage we use our new brainstormed ideas to create a new prototype.
2. Research the need/problem: Here we research good and useful ideas that would help when we get to the designing process.
3. Develop Possible Solution(s): At that stage we brainstorm all the ideas that we think might be useful for our robot and the challenge it has to be successful in.
4. Select the best possible solution(s): Here we narrow down our brainstorm list to the ones we feel are the best.
5. Construct a prototype: Here we use the ideas we decided from our brainstorm list to construct our first prototype.
6. Test and Evaluate the solutions: At this stage we use a program to test our robot and see how successful we were.
7. Communicate the solutions: During this stage, we conclue what the issues of our first robot were and make a plan for the next one which would hopefully make it more successful.
8. Redesign: Lastly, at this stage we use our new brainstormed ideas to create a new prototype.
Explaining Programs
1. This robot is for motors A and B to go forward for 2 seconds then stop, turn, and go forward again for a certain amount of time.
2. This robot will go 12.56 inches.
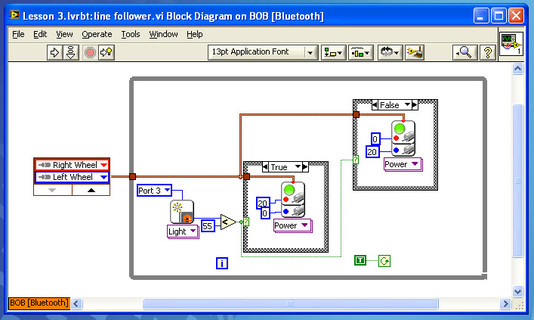
3. If the program is true, where the light sensor is less than 55, motor A will go forward. If this program is false, where the light sensor is greater than 55, motor A will go backwards for a certain amount of time.
4. This program is for a hearing test, for which when you press the touch sensor,1000 will be multiplied by the amount of times you press it and added to the sound frequency.
2. This robot will go 12.56 inches.
3. If the program is true, where the light sensor is less than 55, motor A will go forward. If this program is false, where the light sensor is greater than 55, motor A will go backwards for a certain amount of time.
4. This program is for a hearing test, for which when you press the touch sensor,1000 will be multiplied by the amount of times you press it and added to the sound frequency.
Programs
Line Follower
Thunderstorm
Poor Katherine...

