Building a Prototype
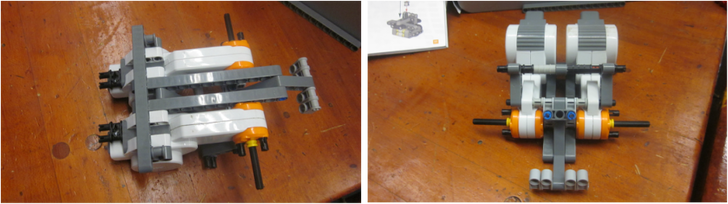
For the maze challenge, we decided to use our NXT kit. We realized that it would be difficult to create a tetrix design that was stable and could easily navigate through the maze. We thought that the NXT robot would be able to move through the maze easier with a slimmer structure and swivel wheel, as well as be quicker to build.
Finished Robot (:
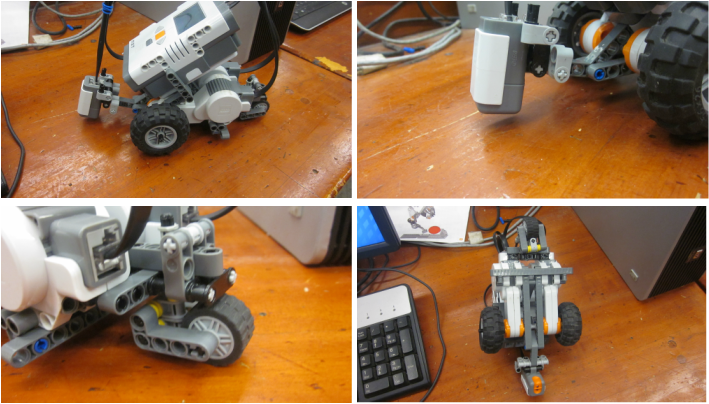
This is the finished product that we built to to go through the maze. We built a slim, stable structure with an NXT programmer, two motors, two front wheels, a swivel wheel, and a sonic sensor.
Maze Route

This is the maze that our robot has to navigate through. Instead of following the black lines, our robot needs to turn at each corner by the help of the sonic sensor.
