Portfolio Guide Reflection
1. State the assignment (problem/project) in your own words.
During this design challenge we were to build, design, and program a robot that would follow a black line in a controlled way when doing so with other robots. This means that if our robot got too close to the robot in front of it, it would know to slow down in order to keep an equal distance between them. It would also know that if it were to be too far away from the robot infront of it, it would speed up in order to maintain the equal distance we told it to keep.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
Before beginning, you need to know what a sturdy structure for this type of challenge would look like. You also will need to figure out what sensors you will need while moving forward in your challenge. This is so you don't forget anything essential when building your robot. Before begginning your program, you would need to know the readings of the black line in order for you to add this to your program for your robot to be able to follow it. Also, you would need to know the distance that you are trying to maintain between the robots to put into the program as well.
http://www.youtube.com/watch?v=7XL83VGEYjU&feature=related
http://www.youtube.com/watch?v=9Ub5qJs7-OI
http://www.youtube.com/watch?v=02cY4U10eas
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
The first step to any design challenge is creating a robot that will be able to complete the task. This was already done because we used the same robot as we did in the Line Follower assignment. Then you move onto the programming. We started by using our program from the first design challenge and adding a sonic sensor as well as another case structure. Our robot kept turning in circles even while we tryed moving the motors and sensors outside of the case structure. We figured out that it was because of having the two case structures, which contradicted eachother, so we got rid of one of them and our robot was able to follow the line again. Now we had a problem with our sonic sensor still not working well which had something to do with the position of our sonic sensor in our program. We tried to fix this by moving it within the wire loop but outside the case structure. We also did the same to the light sensor. We ended up finding out that the reason our sensors weren't working well at times was because we were having an issue with the wiring in our program. After fixing this, we had a working program.
4. Describe the final output / product in detail: (what are we looking at?)
All in all, our robot was successful. In the end it was able to properly follow the black line as well as maintain an equal distance between other robots doing the same thing. This was able to be done by our sonic sensor telling our robot where other robots were and when to slow down or speed up. Although it took us a while to fix our program because of an issue with our wiring connecting to the sonic sensor, we were able to find and fix this problem.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
The majority of the feedback we recieved had to do with our program. This is where we had the most trouble and we went through several programs (shown below) before being successful. Some suggestions were referring to where to move certain things in our program, checking our light sensor values, or checking to make sure our sensors were working correctly. We took this into consideration and in the end we found that all along the wiring to our sonic sensor wasn't correct, which was our problem all along.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
During this assignment I learned how to work with the sonic sensor and light sensor in Labview. Even more so, I learned to work with these together. It is much easier to figure out the programming in order to use just the light sensor or sonic sensor by themselves, but I learned it is much harder to incorporate both of these aspects into the same program. While learning how to do this there was a lot of moving and different placements of these sensors trying to figure out where they would work. This was the most challenging part of the project, but it became easier to figure out as time went on.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
If I were to do this project again, I would start by using our line follower program that we had already made. This way we would have known that at least this portion of the programming was done, without any chances to make silly mistakes when remaking it. The only thing we would have had to do was figure out where and how to add the sonic sensor. These silly mistakes did end up happening because by the end of the project we found out that our issue had to do with the wiring to the sonic sensor. Having this happen, I believe we focused too much on the more complicated parts of the program instead of the simple stuff, such as making sure everything was wired correctly. Next time I would look more into this because without this issue, we could have had a working program much sooner.
During this design challenge we were to build, design, and program a robot that would follow a black line in a controlled way when doing so with other robots. This means that if our robot got too close to the robot in front of it, it would know to slow down in order to keep an equal distance between them. It would also know that if it were to be too far away from the robot infront of it, it would speed up in order to maintain the equal distance we told it to keep.
2. What are your input factors? (What do you need to know or do before you can begin?) Include the research you did.
Before beginning, you need to know what a sturdy structure for this type of challenge would look like. You also will need to figure out what sensors you will need while moving forward in your challenge. This is so you don't forget anything essential when building your robot. Before begginning your program, you would need to know the readings of the black line in order for you to add this to your program for your robot to be able to follow it. Also, you would need to know the distance that you are trying to maintain between the robots to put into the program as well.
http://www.youtube.com/watch?v=7XL83VGEYjU&feature=related
http://www.youtube.com/watch?v=9Ub5qJs7-OI
http://www.youtube.com/watch?v=02cY4U10eas
3. Describe the process in detail. Explain the steps you followed in order to complete the project.
The first step to any design challenge is creating a robot that will be able to complete the task. This was already done because we used the same robot as we did in the Line Follower assignment. Then you move onto the programming. We started by using our program from the first design challenge and adding a sonic sensor as well as another case structure. Our robot kept turning in circles even while we tryed moving the motors and sensors outside of the case structure. We figured out that it was because of having the two case structures, which contradicted eachother, so we got rid of one of them and our robot was able to follow the line again. Now we had a problem with our sonic sensor still not working well which had something to do with the position of our sonic sensor in our program. We tried to fix this by moving it within the wire loop but outside the case structure. We also did the same to the light sensor. We ended up finding out that the reason our sensors weren't working well at times was because we were having an issue with the wiring in our program. After fixing this, we had a working program.
4. Describe the final output / product in detail: (what are we looking at?)
All in all, our robot was successful. In the end it was able to properly follow the black line as well as maintain an equal distance between other robots doing the same thing. This was able to be done by our sonic sensor telling our robot where other robots were and when to slow down or speed up. Although it took us a while to fix our program because of an issue with our wiring connecting to the sonic sensor, we were able to find and fix this problem.
5. Describe feedback you received during the project (suggestions, comments, etc). From peers, instructor ect.. How did you use this feedback to correct issues with your project?
The majority of the feedback we recieved had to do with our program. This is where we had the most trouble and we went through several programs (shown below) before being successful. Some suggestions were referring to where to move certain things in our program, checking our light sensor values, or checking to make sure our sensors were working correctly. We took this into consideration and in the end we found that all along the wiring to our sonic sensor wasn't correct, which was our problem all along.
6. What did you learn during the assignment such as tools, skills, design concepts, software, hardware, etc?
During this assignment I learned how to work with the sonic sensor and light sensor in Labview. Even more so, I learned to work with these together. It is much easier to figure out the programming in order to use just the light sensor or sonic sensor by themselves, but I learned it is much harder to incorporate both of these aspects into the same program. While learning how to do this there was a lot of moving and different placements of these sensors trying to figure out where they would work. This was the most challenging part of the project, but it became easier to figure out as time went on.
7. If you were to do the project again, what would you do differently and why? Provide reasons and examples
If I were to do this project again, I would start by using our line follower program that we had already made. This way we would have known that at least this portion of the programming was done, without any chances to make silly mistakes when remaking it. The only thing we would have had to do was figure out where and how to add the sonic sensor. These silly mistakes did end up happening because by the end of the project we found out that our issue had to do with the wiring to the sonic sensor. Having this happen, I believe we focused too much on the more complicated parts of the program instead of the simple stuff, such as making sure everything was wired correctly. Next time I would look more into this because without this issue, we could have had a working program much sooner.
Our Robot(:
For the design challenge of Intelligent Highway, we used the saw robot design as our first challenge of Line Follow Bot. Although we did not use the sonic sensor during our first challenge, it was already on our robot and came in very handy during this challenge. This saved a lot of time in not having to redesign our robot.
Program attempt 1
True
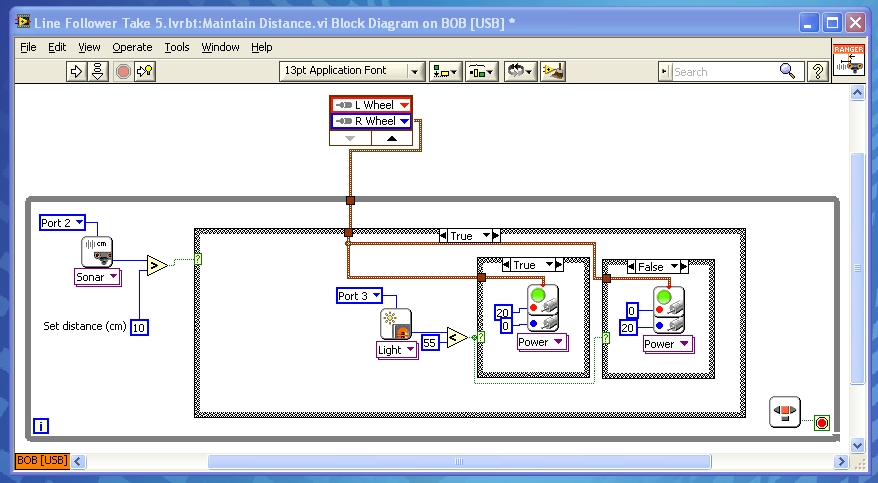
In this program, it is telling out robot to (with the light sensor's reading) turn on motor 1 and off motor 2 if the reading of the black line is less than 55, and if it greater than this reading then motor 2 would turn on while motor 1 is off. This program was unsuccessful and all we got out of it was our robot continuously moving in circles. Our first thought was that there was possibly an issue with the light sensor readings but in the end we took out one of the case structures to solve this problem.
False
This program goes with the program above, only it is showing what the robot would do if the statement were false. If the light sensor reading is not less than 55, one motor should turn on with a power level of 5, while the other motor is turned off. We found out that having two case structures contradicted our true and false statements of the program which caused our robot to turn in circles instead of follow the black line.
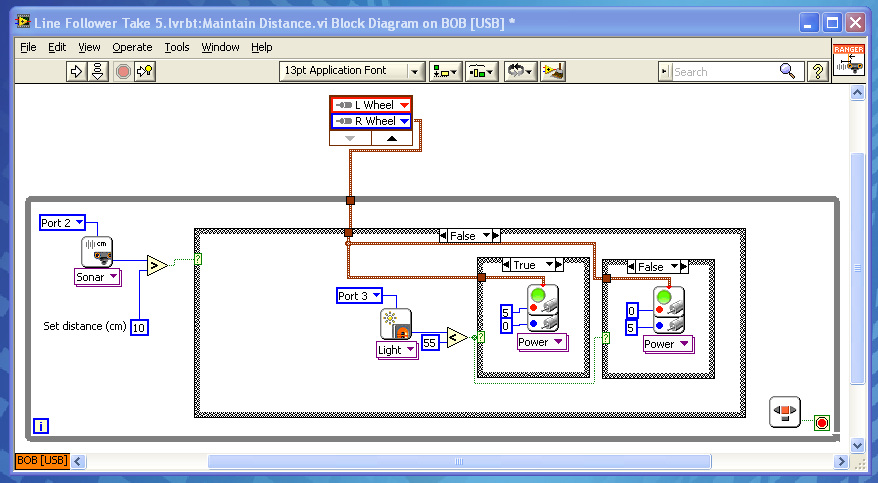
Program attempt 2
False
This program differs very slightly from our first attempt. It is still stating that if the light sensor value is less than 55 and the robot seed an object that is greater than 10 cm away, one motor will speed up while the other would slow down. On the other hand, if the object was less than 10 cm away the other motor would turn on while the first one would slow down. The biggest difference in this program compared to our first is the negatives. We thought this would make our robots motor turn in the opposite direction, making our robot slow down. However, this did not happen.
True
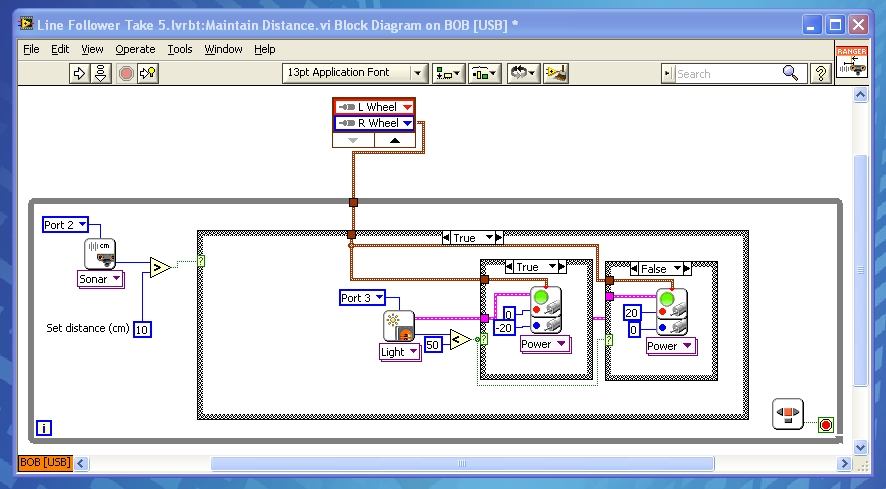
This program goes along with the one above. The change between this and our first attempt, again, are the negatives values for our power levels. This idea did not work and did not prove to make our robot successful. Moving on we figured out that having the two case structures contradict eachother and moving forward in our programing, we took one of these out.
Program attempt 3
False, False
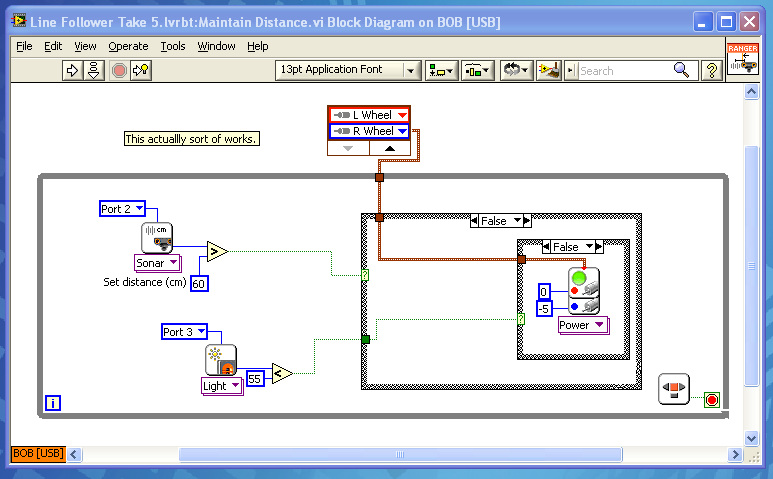
The changes to our next program attempt is that we got rid of one of the case structures. We also moved the light sensor to outside of the case structure, but still in the wireloop (where the sonic sensor has been). This program is telling our robot that if the light sensor value isn't less than 55 and the object our sonic sensor sees is less than 60 cm away from our robot then our robot will slow down to maintain its distance.
False, True
This program reads that if the light sensor reading isn't less than 55 and the sonic sensor reads an object less than 60 cm away, then the robot will slow down.
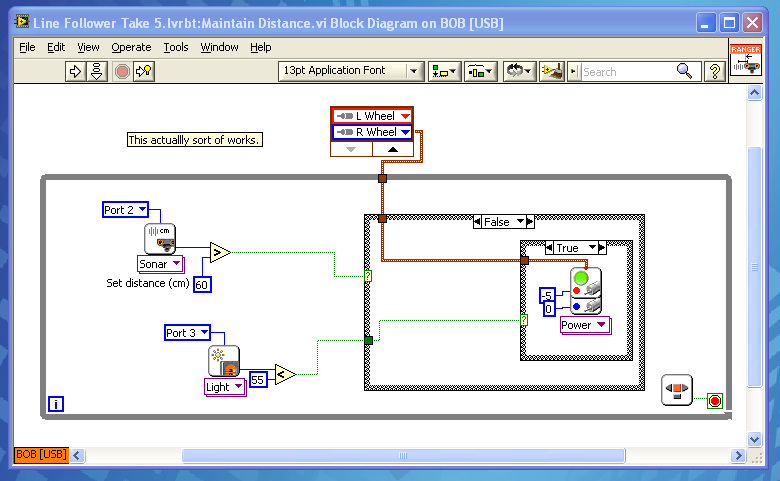
True, True
This part of the program is telling our robot that if the object is greater than 60 cm away and the light sensor value is less than 55 or 50, then the robot should speed up.
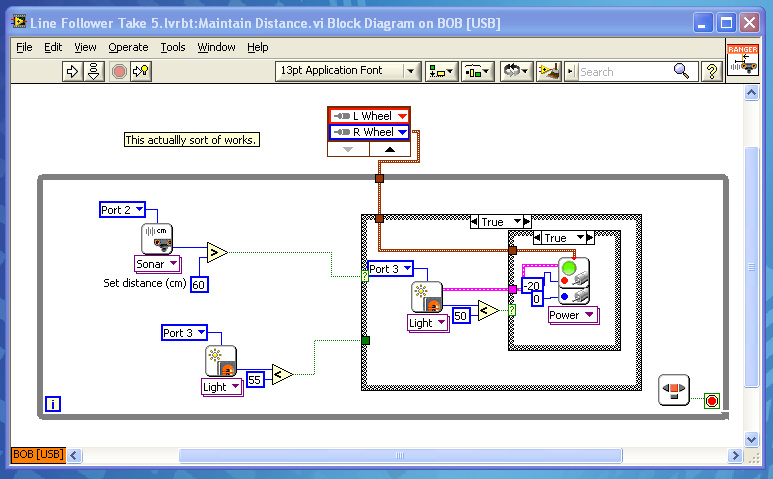
True, False
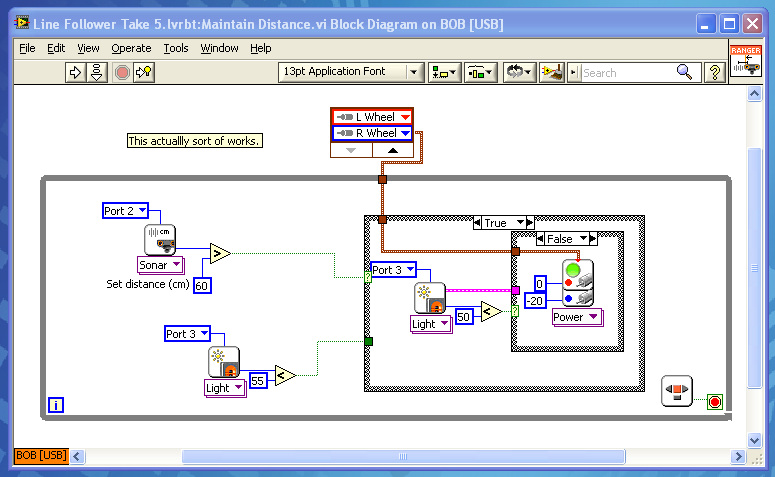
Lastly, our program is stating that if the light sensor has a reading less than 55 and sees an object greater than 60 cm away, the robot will speed up.
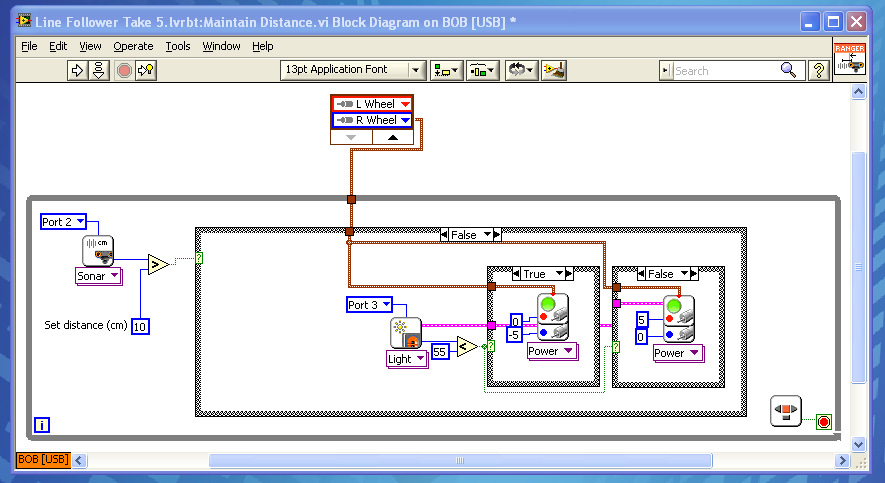
Program attempt 4
False, False
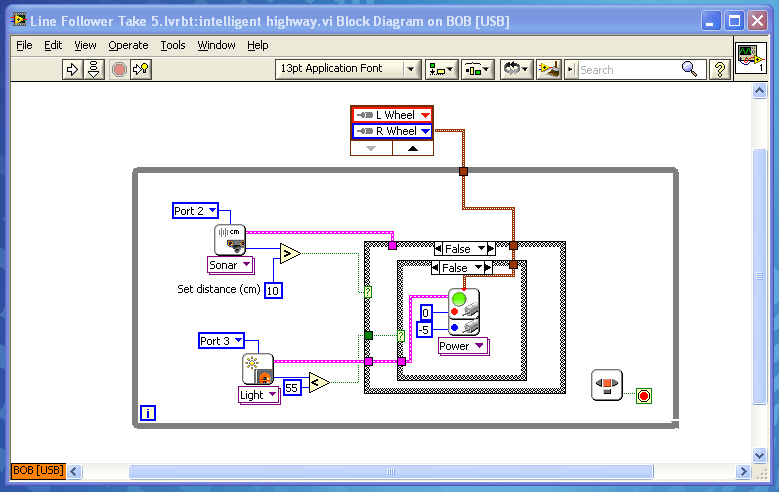
This is the first section of our working program. It is saying that if the object in front of our robot is less than 10 cm, motor 2 would slow down and motor one would stop. We found out that the reason this program was successful while the other was not, was because we had a problem with the wiring.
False, True
Similiar to the one shown above, this program is telling the robot that if the object in front of the it is less than 10 cm then motor 1 will slow down and motor 2 will shut off.
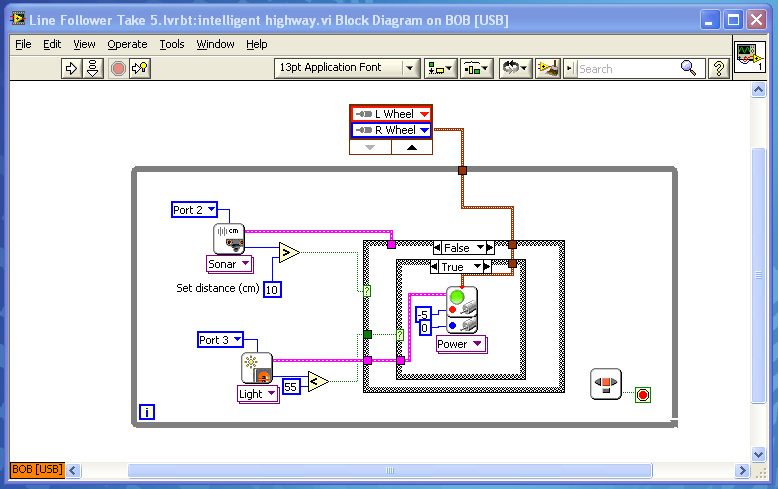
True, True

This program is showing that if an object is greater than 10 cm away, motor 1 would speed up and motor 2 would shut off.
True, False
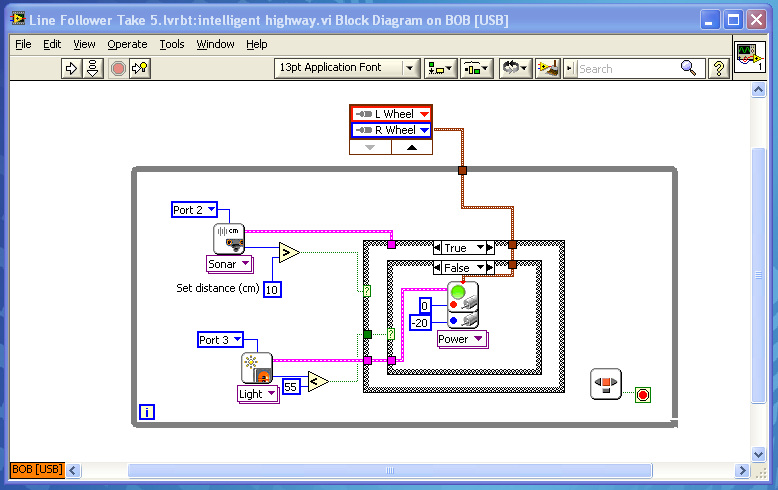
This section of the program made it so our robot knew that if an object was greater than 10 cm away, motor 2 would speed up while motor 1 would stop.
