Info
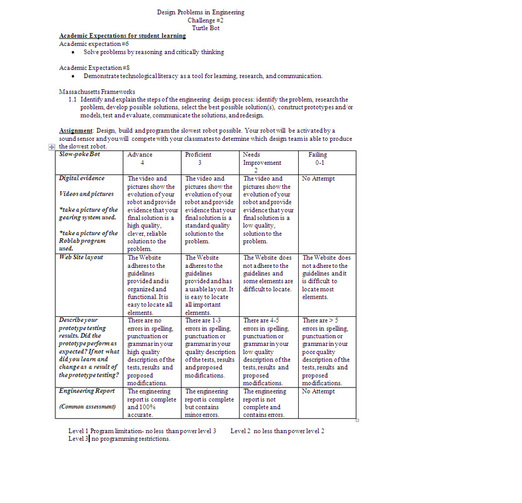
In this design challenge we had to create a robot that went the slowest over a distance of six feet. To make this happen we had to use different gear ratios, trying to find the one that made our robot go the slowest. This would be a small gear turning a big gear, making it slower and stronger. Also, being a level one student, we had to use power level three, making this challenge more difficult.
Definitions
Prototype (n): the original or model on which something is based or formed.
Design Constraints: refers to the limitations on the conditions under which a system
is developed.
Design Constraints: refers to the limitations on the conditions under which a system
is developed.
Prototype 1
Our first prototype failed to move. The gears and wheels seemed to be moving at a very slow rate which was a success, although the way we connected the other peices of the robot did not work. We had the motor connected to the side with the computer supposively dragging along behind, which didn't happen. Our next idea is to connect the computer in a way that will let the robot move forward.
Prototype 2

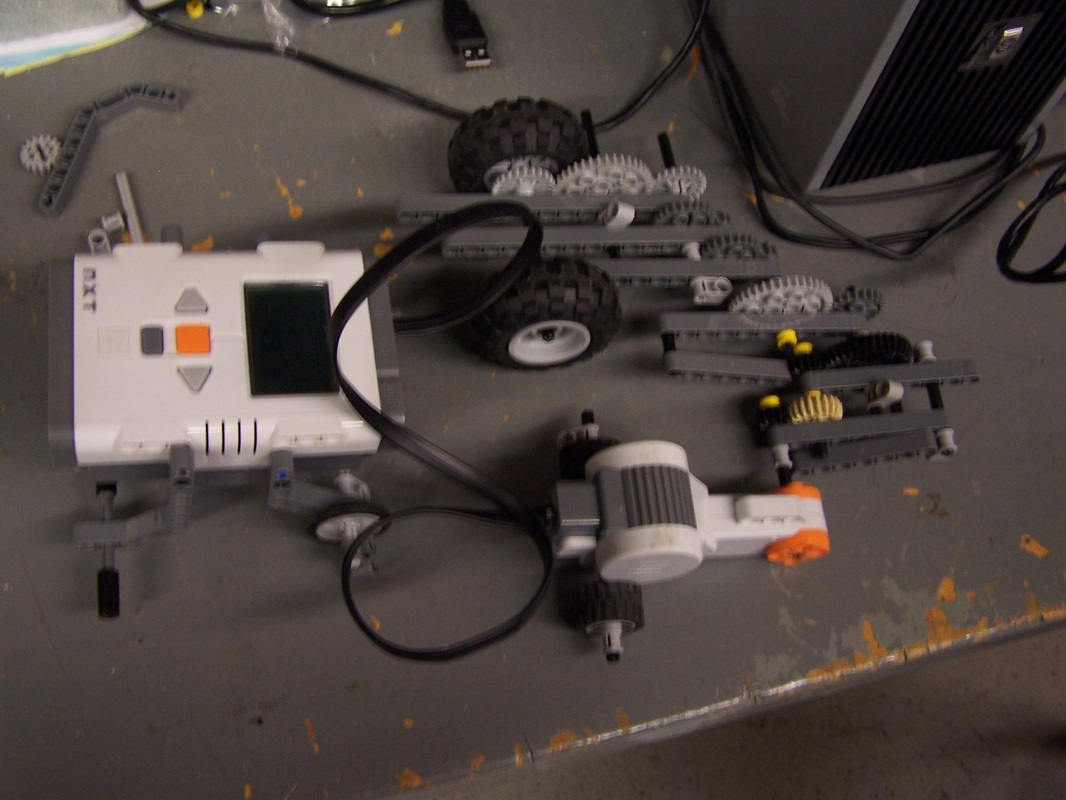
Our next prototype was a success. We kept the same gear format but changed the set up of our robot. Instead of having the computer drag along behind, we switched this to have the computer being pushed infront and connected it in a way that it would be centered and sturdy. To do this we also had to make minor adjustments in the gears, so as to make them turn the wheels in the opposite direction. Overall, the robot moved at a speed of 0.000631 mi/h, which is also 0.000926 ft/s using power level 3.
Gears
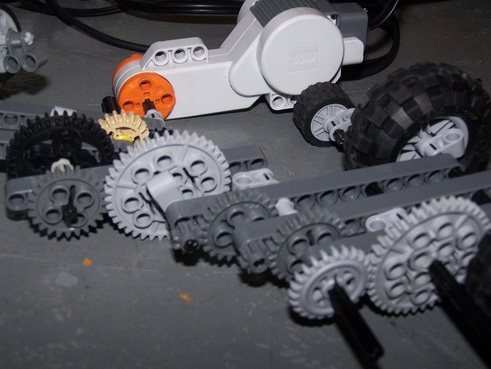
Our gearing ratio is 1 to 80. For every 80 times the gear spun near the motor, the wheel spun once.
Program
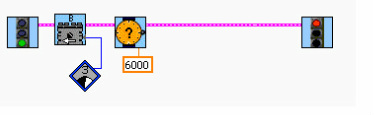
Turtle Bot
| slowbot_video.mov |
